La clave para implementar una aplicación robusta de visión artificial es asegurarse de crear el ambiente necesario y consistente para obtener la mejor imagen posible. Para garantizar la estabilidad de la imagen es importante tomar en cuenta los siguientes factores: iluminación, lentes y manejo de materiales. En esta entrada del blog, nos enfocaremos en las siete técnicas principales de iluminación que se utilizan en las aplicaciones de visión artificial.
Iluminación anular sobre el eje de la cámara
La iluminación anular sobre el eje es el tipo más común de iluminación porque en muchos casos está integrada en la cámara y está disponible como un número de pieza. Cuando utilice este tipo de iluminación, casi siempre querrá estar algunos grados fuera de la perpendicular (Imagen 1A). Si la iluminación está perpendicular al objeto, se obtendrán puntos conflictivos no deseados en la imagen obtenida (Imagen 1B). Cuando la cámara con su luz anular se inclina ligeramente fuera de la perpendicular del objeto, se obtiene la imagen deseada (Imagen 1C).
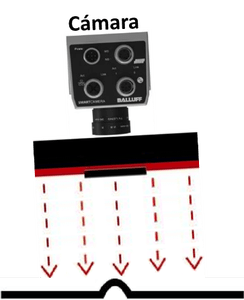

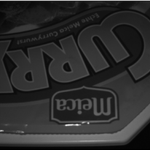
Imagen 1A Imagen 1B Imagen 1C
Iluminación del campo brillante fuera del eje
Esta técnica consiste en tener una fuente de LED separada montada a aproximadamente 15 grados con respecto a la perpendicular y con la cámara montada perpendicular a la superficie (Imagen 2A). Esta técnica de iluminación funciona mejor en superficies principalmente planas. La superficie o el campo principal será brillante y los orificios o hendiduras estarán oscuros (Imagen 2B).
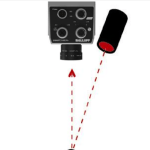
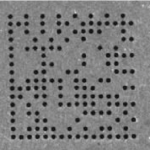
Imagen 2A Imagen 2B
Iluminación del campo oscuro
Se requiere que la iluminación del campo oscuro esté muy cerca de la pieza, generalmente alrededor de una pulgada. El ángulo de montaje de los LEDs de campo oscuro debe ser de al menos 45 grados o más para crear el efecto deseado (Imagen 3A). En resumen, tiene el efecto opuesto de la iluminación del campo brillante, lo que significa que la superficie o el campo es oscuro y las muescas o protuberancias serán mucho más brillantes (Imagen 3B).
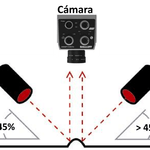
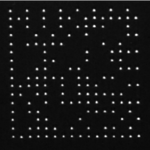
Imagen 3A Imagen 3B
Iluminación de fondo
La iluminación de fondo funciona haciendo que la cámara apunte directamente a la luz de fondo en un soporte perpendicular. El objeto que está inspeccionando se coloca entre la cámara y la luz de fondo (Imagen 4A). Esta técnica de iluminación es la más sólida que puede usar pues crea un objetivo negro sobre un fondo blanco (Imagen 4B).
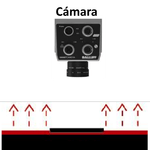

Imagen 4A Imagen 4B
Iluminación difusa de domo
La iluminación difusa de domo, también conocida como la “iluminación de ensaladera”, funciona al tener un orificio en la parte superior del domo donde se monta la cámara y los LEDs se montan en el borde, apuntando hacia arriba, lo que hace que la luz se refleje fuera de la superficie curva de la “ensaladera” y se cree una reflexión muy uniforme (Imagen 5A). La iluminación difusa de domo se usa cuando el objeto que se está inspeccionando es curvo o no es uniforme (Imagen 5B). Después de aplicar esta técnica de iluminación a una superficie o textura irregular, los puntos conflictivos y otros detalles nítidos se resaltan, y se crea una especie de acabado mate en la imagen (Imagen 5C).
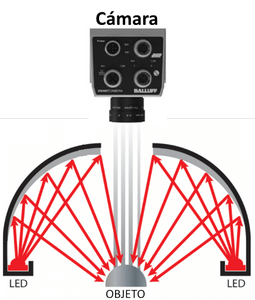
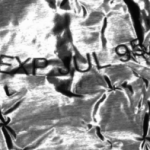
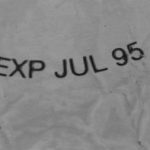
Imagen 5A Imagen 5B Imagen 5C
Iluminación difusa sobre el eje de la cámara
La iluminación difusa sobre el eje de la cámara, o DOAL (por sus siglas en inglés, Diffused On-Axis Lighting), funciona al tener una fuente de luz LED apuntando a un divisor de haz. La luz reflejada es paralela a la dirección de montaje de la cámara (Imagen 6A). La iluminación DOAL solo debe usarse en superficies planas en las que se intenta disminuir partes muy brillantes de la superficie para crear una imagen uniforme. Aplicaciones para la inspección de objetos como DVDs, CDs u obleas de silicón son algunos de los usos más comunes para este tipo de iluminación.
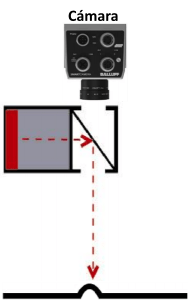
Imagen 6A
Iluminación estructurada con líneas láser
La iluminación estructurada con líneas láser funciona al proyectar una línea láser sobre un objeto tridimensional (Imagen 7A), lo que da como resultado una imagen que le brinda información sobre la altura del objeto. Según el ángulo de montaje de la cámara y el transmisor de líneas láser, el cambio resultante en las líneas láser será mayor o menor a medida que cambie el ángulo de los dispositivos (Imagen 7B). Cuando no hay ningún objeto, la línea láser será plana (Imagen 7C).

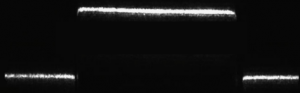
Imagen 7A Imagen 7B Imagen 7C
Aplicaciones de la vida real
Las imágenes 8A y 8B son muestras de una aplicación para contar los pines de un conector. La iluminación de campo brillante de la izquierda no produce una imagen clara, mientras que la iluminación de campo oscuro de la derecha sí lo hace.
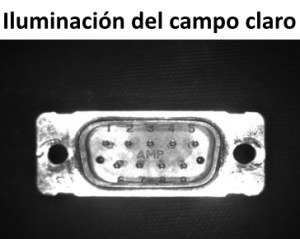

Imagen 8A Imagen 8B
Las imágenes 9A y 9B fueron obtenidas de una aplicación para lectura de código de barras a través de un envoltorio de celofán. La imagen no clara (Imagen 9A) se adquirió utilizando una iluminación anular sobre el eje de la cámara, mientras que el uso de una iluminación de domo (Imagen 9B) dio como resultado una imagen clara y legible
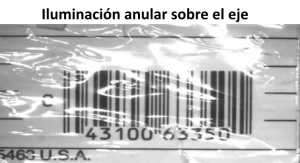

Imagen 9A Imagen 9B
En el siguiente ejemplo, las imágenes 10A, 10B y 10C muestran diferentes técnicas de iluminación en el mismo objeto. En la imagen 10A, se utiliza la iluminación de fondo para medir el diámetro del agujero más pequeño. En la imagen 10B, la iluminación de domo se usa para inspeccionar el cono del orificio superior en referencia al orificio inferior. En la imágen 10C, la iluminación de campo oscuro se está utilizando para realizar el reconocimiento óptico de caracteres OCR (Optical Character Recognition) en el objeto.



Imagen 10A Imagen 10B Imagen 10C
Agradecemos a nuestros Partners de Balluff por el apoyo en la creación de este artículo. Puedes consultar la versión original de esta publicación haciendo click en el siguiente enlace


